
Negli ultimi anni, l’Europa ha promosso politiche di mobilità sostenibile che puntano alla riduzione dei veicoli privati e all’incremento della qualità della vita nelle aree urbane, promuovendo mezzi di trasporto ecologici come biciclette, e-bike e monopattini elettrici, questo porta a nuove necessità e valutazioni nell’ambito della sicurezza stradale.
Tra le nuove forme di mobilità, i monopattini elettrici hanno registrato una diffusione notevole, con 42.000 unità in condivisione e 50.000 di proprietà privata in Italia nel 2021. Nello stesso anno, infatti, i servizi di condivisione di monopattini elettrici costituiscono la metà dei noleggi totali, evidenziando una crescita significativa rispetto al 2020.
La rapida adozione dei monopattini elettrici in molte città europee è stata influenzata da diversi fattori, quali il costo accessibile, la sostenibilità, la flessibilità d’uso e la possibilità di utilizzo senza la necessità di una patente [1].
Tuttavia, il crescente utilizzo ha portato a un aumento degli incidenti stradali correlati a tali veicoli (Figura 1 sotto). In Italia, secondo l’ISTAT, gli incidenti coinvolgenti monopattini elettrici sono passati da 564 a 2.101 nel periodo 2020-2021, con il numero di feriti che è aumentato da 518 a 1.980 e con dieci decessi registrati nel 2021 [2].
Le cause degli incidenti comprendono la velocità dei monopattini elettrici, le condizioni stradali, l’uso di alcol e droghe, il comportamento insicuro del conducente e l’assenza di casco, contribuendo alla gravità degli incidenti [3]. Le infrazioni più comuni includono la circolazione sul marciapiede, la guida contromano e la non osservanza delle regole di precedenza [4].
Nonostante l’aumento degli incidenti, mancano Norme di sicurezza unificate a livello europeo per i monopattini elettrici, con ciascun Paese membro che adotta regolamenti propri. In Italia, ad esempio, i monopattini elettrici sono equiparati ai velocipedi.

La velocità massima consentita è di 20 km/ora, ridotta a 6 km/ora nelle aree pedonali. L’uso dei monopattini elettrici è severamente vietato sui marciapiedi, tranne dove è autorizzata la promiscuità tra ciclisti e pedoni. I monopattini possono circolare sulle strade urbane purché il limite di velocità non superi i 50 km/ora, nelle zone pedonali e dove sono presenti percorsi misti pedoni-ciclisti [5].
In tale contesto, si è voluto procedere con una comparazione critica tra i monopattini, che ad oggi rappresentano la vera novità nell’ambito delle strategie di mobilità sostenibile, e le biciclette, che invece costituiscono lo strumento tradizionale a servizio della mobilità sostenibile medesima.
La suddetta comparazione, in particolare, è stata condotta attraverso l’analisi delle interazioni tra autoveicoli, monopattini elettrici e biciclette presso un’intersezione non semaforizzata nella città di Catania.
Le dinamiche delle interazioni “monopattini elettrici/autovetture” e “biciclette/autovetture” sono state definite e analizzate attraverso l’utilizzo di misure surrogate di sicurezza e la valutazione delle velocità dei veicoli coinvolti nelle suddette interazioni.
La raccolta e l’analisi dei dati
Il campo di indagine delle attività di rilievo è stata una intersezione urbana poli-ramo della città di Catania (Figura 2 sotto). I due rami secondari sono regolamentati, in un caso, dal segnale di Stop e, nell’altro caso, dal segnale di dare precedenza. Tutte le categorie di veicoli viaggiano promiscuamente sulla carreggiata e non ci sono percorsi riservati per le biciclette e i monopattini.
Gli scenari di traffico sono stati acquisiti mediante una telecamera ad alta risoluzione montata sul tetto di un edificio adiacente all’area di studio.
Nel periodo compreso tra il 28 Giugno 2022 e il 7 Luglio 2022, sono state condotte quattro indagini giornaliere, considerando gli intervalli di tempo corrispondenti ai principali orari di punta, ovvero: 8:30-9:30, 12:30-13:30, 15:30-16:30, 17:30-18:30. Durante le ore totali registrate, sono transitati 194 monopattini elettrici e 166 biciclette.
Le registrazioni video sono state elaborate per valutare i volumi di traffico di auto, monopattini elettrici e biciclette e per identificare le interazioni da cui potrebbero derivare conflitti potenziali tra auto e biciclette e tra auto e monopattini elettrici.
Le traiettorie degli utenti coinvolti nelle interazioni sono state quindi estratte utilizzando il software scientifico open-source “TAnalyst” che è in grado di tracciare gli spostamenti specifici dei veicoli, fotogramma per fotogramma, generare le traiettorie per l’analisi delle interazioni e stimare le velocità corrispondenti.

L’identificazione delle interazioni
Un’interazione è definita come una situazione in cui due utenti della strada si avvicinano abbastanza sia temporalmente che spazialmente in modo che la presenza di uno dei due possa influenzare il comportamento dell’altro [6]. In questo studio, sono state prese in considerazione le interazioni di “intersezione” e di “inseguimento” coinvolgenti automobili, monopattini elettrici e biciclette.
Le interazioni di “intersezione” sono state definite come quelle situazioni nelle quali due veicoli confluiscono all’incrocio da direzioni differenti e le loro traiettorie si intersecano.
Le interazioni di “inseguimento”, invece, sono state definite come quelle situazioni in cui un’auto si avvicina a una bicicletta o a un monopattino, ponendosi dietro a essi a una distanza specifica, stimata in 13 m per le interazioni auto/bicicletta e 11 m per le interazioni auto/monopattino. Questi dati derivano da un’analisi di casi osservati nell’incrocio stradale studiato.
Sulla base delle suddette definizioni, è stato individuato un totale di 128 interazioni tra auto e monopattini elettrici e 89 interazioni tra auto e biciclette. Le interazioni che coinvolgono i monopattini elettrici sono state suddivise come segue: 92 interazioni di “intersezione” e 36 di “inseguimento”. Le interazioni tra auto e biciclette sono risultate 47 di “intersezione” e 42 di “inseguimento”.
Considerando il numero di utenti registrati all’incrocio, ovvero 194 monopattini elettrici e 166 biciclette, più dell’80% dei monopattini elettrici registrati nell’area di studio ha “interagito” con le automobili, rispetto al circa il 70% delle biciclette. Questo è il primo risultato dell’indagine che mostra già una maggiore esposizione, rispetto ai ciclisti, dei conducenti di monopattini elettrici a eventi potenzialmente a rischio di incidenti.
La valutazione del livello di sicurezza delle interazioni
Per valutare il livello di sicurezza delle interazioni, si è proceduto attraverso due step:
- valutazione di due indicatori surrogati di sicurezza, il Time To Collision (TTC) e il Post Encroachment Time (PET);
- determinazione dei valori delle velocità di tutti i mezzi coinvolti nelle diverse interazioni.
Il Time To Collision (TTC) è definito come il tempo rimanente prima che due veicoli collidano, qualora essi mantengano immutate le rispettive traiettorie e velocità. Il valore minimo di TTC è di particolare interesse perché rappresenta il valore associato al rischio di collisione più elevato. Le ricerche suggeriscono che i valori di TTC inferiori a 1,5 secondi sono raramente osservati in interazioni normali e possono quindi essere considerati rappresentativi di interazioni ravvicinate [7, 8 e 9].
Il Post Encroachment Time (PET) è il tempo che intercorre tra il momento in cui il primo veicolo lascia il punto (o la zona) di conflitto e il momento in cui il secondo veicolo raggiunge tale punto (o zona). Un PET più lungo indica un margine di sicurezza maggiore dopo aver superato il punto critico ed è associato a un comportamento di guida più sicuro. Tutti i valori di PET inferiori a 1,0 s sono stati considerati interazioni ravvicinate in base alla letteratura scientifica [7, 8 e 9].
Per ciò che concerne la caratterizzazione delle velocità dei veicoli durante le interazioni, al fine di poter poi procedere con un razionale confronto tra le diverse situazioni rilevate, si è scelto di utilizzare la velocità dell’85° percentile (V85). La stima dei suddetti indicatori surrogati nonché delle velocità veicolari è avvenuta mediante il software TAnalyst.
Risultati dell’indagine sperimentale: indicatori surrogati di sicurezza
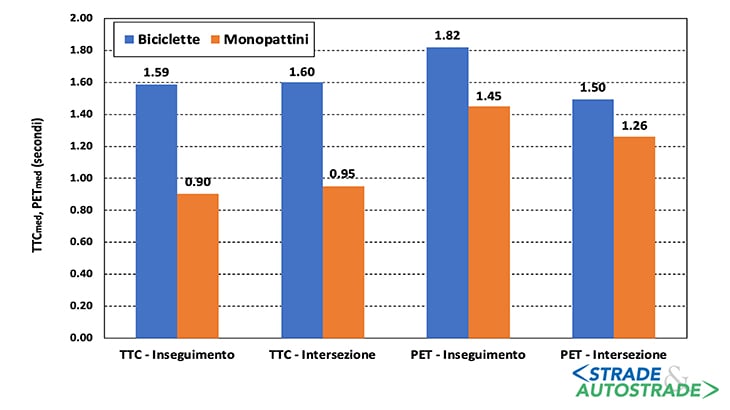
A seguito di elaborazioni statistiche dei valori di TTC e PET ottenuti per le due categorie di utenti (biciclette e monopattini elettrici) per i due diversi tipi di interazione (intersezione e inseguimento), sono stati ottenuti i risultati graficizzati nelle Figure 3A e 3B sopra che possono essere così sintetizzati:
- i valori medi di TTC e PET per le interazioni tra auto e biciclette risultano costantemente superiori rispetto a quelli corrispondenti alle interazioni con i monopattini elettrici (Figura 3A). In particolare, lo scostamento minimo, pari al 19%, si osserva per i valori di PET associati all’interazione di intersezione. Lo scostamento massimo, pari al 75%, è invece evidente per i valori di TTC relativi all’inseguimento;
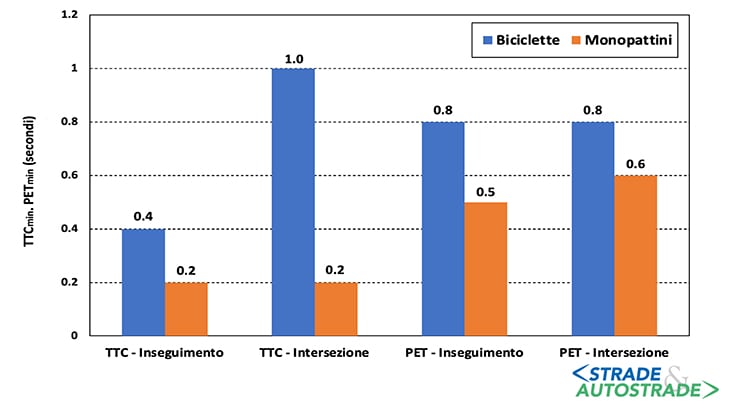
- i valori minimi di TTC e PET riscontrati per le interazioni tra auto e biciclette sono superiori a quelli relativi alle interazioni tra auto e monopattini (Figura 3B). Nello specifico, nel caso delle interazioni di intersezione tra auto e biciclette, il valore di PET è 1,3 volte superiore rispetto all’interazione dello stesso tipo coinvolgente auto e monopattini (scostamento minimo). Inoltre, il valore di TTC associato alle interazioni di intersezione tra auto e biciclette è cinque volte superiore rispetto al TTC relativo alle interazioni dello stesso tipo tra automobili e monopattini elettrici (scostamento massimo);
- i valori medi di TTC per le interazioni di intersezione e di inseguimento sono sempre abbastanza simili in tutti i casi analizzati (differenza non superiore al 5%);
- i valori medi di PET per le interazioni di intersezione tra auto e monopattini sono inferiori del 16% rispetto a quelli associati alle interazioni dello stesso tipo tra auto e biciclette;
- i valori medi di PET per le interazioni di inseguimento auto/monopattini sono inferiori del 20% rispetto a quelli relativi alle analoghe interazioni tra auto e biciclette.
Le suddette considerazioni evidenziano come gli utenti dei monopattini elettrici siano esposti a un livello di rischio di collisione significativamente maggiore rispetto ai ciclisti, sia nelle interazioni di “intersezione” che in quelle di “inseguimento”.
Questa disparità è supportata dai dati relativi ai valori di TTC e PET, che indicano una minore sicurezza per i conducenti di monopattini quando interagiscono con veicoli a motore. Le dimensioni ridotte e la visibilità limitata dei monopattini potrebbero contribuire al verificarsi di questo problema, rendendoli meno rilevabili rispetto alle biciclette, più grandi e visibili.
 per i veicoli coinvolti nelle interazioni prese in esame")
La prevedibilità del comportamento è anche un fattore critico, poiché i ciclisti tendono a seguire le regole della circolazione in modo più consistente rispetto agli utenti di monopattini, che potrebbero essere meno disciplinati. La rilevabilità limitata e la consapevolezza ridotta da parte dei conducenti potrebbero aumentare ulteriormente il rischio per i monopattini, che potrebbero non attirare sufficiente attenzione a causa della loro relativa rarità sulle strade.
Altri fattori come la manovrabilità, la velocità, l’accelerazione e il comportamento degli utenti, contribuiscono anch’essi alle differenze di sicurezza tra ciclisti e conducenti di monopattini.
Tuttavia, è importante notare che queste considerazioni sono ipotetiche e ulteriori ricerche sono necessarie per comprendere completamente le ragioni di tali differenze e valutare gli impatti complessivi dell’integrazione dei monopattini sulla dinamica del traffico e sulla sicurezza stradale.
I risultati dell’indagine sperimentale: velocità dei veicoli durante le interazioni
I valori delle velocità dell’85° percentile (V85) sono stati determinati a partire dai profili delle velocità di automobili, biciclette e monopattini elettrici durante le dinamiche analizzate per la caratterizzazione delle diverse interazioni prese in esame. L’istogramma di Figura 5 riporta i valori della V85 corrispondenti ai casi considerati.
Si può osservare come negli scenari di inseguimento automobili/biciclette, le automobili mostrino una V85 superiore rispetto alle biciclette. Anche nel caso delle interazioni di intersezione, le automobili hanno una V85 maggiore di quella delle biciclette.
Questo indica che la maggior parte delle autovetture può mantenere una velocità più elevata quando interagisce con le biciclette, potendo gestire agevolmente sia le situazioni di inseguimento che quelle di intersezione.
Riguardo alle interazioni tra autovetture e monopattini elettrici si deve rilevare che, negli scenari di inseguimento, le automobili e i monopattini elettrici mostrano V85 simili, con le autovetture che sono leggermente meno veloci.
Nel caso degli scenari di intersezione, invece, le automobili manifestano una V85 più alta, anche se di poco, di quella dei monopattini elettrici (scostamento del 16%). Questo indica che la maggior parte delle autovetture può gestire meglio le situazioni in cui le loro traiettorie si intersecano con quelle dei monopattini elettrici.

I valori delle velocità riportati nell’istogramma di Figura 5, inoltre, permettono di svolgere delle considerazioni in merito alle conseguenze sugli utenti dei veicoli coinvolti, qualora le interazioni studiate dovessero degenerare in collisioni vere e proprie.
In tale contesto è possibile valutare, anche se con un certo grado di approssimazione, le variazioni di velocità (DV) sui veicoli coinvolti nell’impatto.
A rigore, il grado di elasticità della collisione, che tiene conto di quanta energia viene assorbita dalla deformazione dei corpi, può influenzare la suddetta variazione di velocità. Nella pratica, però, è possibile, seppur in maniera semplificata, assumere una collisione completamente anelastica, con i veicoli che, a seguito dell’urto, si muovono come se fossero uno solo.
Si può così far riferimento alle seguenti formulazioni [9]:
![]()

dove:
- DV1, DV2, m1, m2, V1 e V2 = rispettivamente variazioni di velocità, masse e velocità dei veicoli coinvolti nell’ipotetico urto e α è l’angolo d’impatto.
Nel caso delle interazioni studiate, nell’ipotesi che esse possano degenerare in collisioni, considerando le velocità riportate nel grafico di Figura 5 e con riferimento alle seguenti masse in gioco: mautomobili = 1.300 kg, mbicicletta = 100 kg e mmonopattino = 90 kg, si ottengono i risultati riportati in Figura 5.
Dall’analisi della Figura 5 risulta evidente che, nelle interazioni di intersezione, i valori di ΔV associati agli utenti più vulnerabili sono molto simili sia per le biciclette che per i monopattini. Ciò indica che, in caso di collisione con le autovetture, gli utenti di biciclette e monopattini avrebbero conseguenze simili in termini di danni.
Al contrario, nelle interazioni di inseguimento, si nota che, confrontando le conseguenze di una collisione tra automobili e biciclette e tra automobili e monopattini, sarebbero gli utenti delle biciclette a subire le variazioni di velocità più cospicue.
È importante comunque sottolineare che, grazie alle basse velocità coinvolte, nessuna delle potenziali collisioni associate ai valori di ΔV riportati in Figura 5 porterebbe a esiti fatali. Infatti, come illustrato nel grafico della Figura 6, per un ΔV pari a 7 m/s (che è circa il massimo valore riportato in Figura 5), la probabilità di gravi conseguenze è compresa tra l’1% e l’8%, con un valore medio pari a circa il 3,5%.
Questi risultati evidenziano comunque che soltanto attraverso comportamenti di guida adeguati, come l’approccio alle intersezioni a velocità ridotte, possono essere garantiti livelli di sicurezza accettabili sia per gli utenti dei monopattini elettrici che per quelli delle biciclette. Basterebbero infatti pochi scostamenti nei valori di DV per far incrementare notevolmente la probabilità di feriti gravi a seguito di collisioni.

Conclusioni
La ricerca, sebbene basata su uno studio-pilota, evidenzia chiare implicazioni per migliorare la sicurezza stradale nelle interazioni tra automobili, biciclette e monopattini elettrici.
I conducenti di monopattini elettrici sono esposti a un rischio di collisione significativamente maggiore rispetto ai ciclisti in situazioni di “intersezione” e “inseguimento”. Nonostante le basse velocità coinvolte riducano il rischio di conseguenze mortali, sono necessarie azioni concrete per affrontare questa problematica.
Sebbene la Normativa abbia già compiuto passi importanti per ridurre i rischi di incidenti stradali con il coinvolgimento dei monopattini elettrici, come l’obbligo del casco e i limiti di velocità, sono necessarie ulteriori azioni. Ad esempio, si potrebbe valutare l’implementazione di sistemi di segnalazione luminosa per aumentare la visibilità degli utenti della strada, non solo sui nuovi monopattini ma anche mediante l’adeguamento dei modelli già presenti sulle strade.
Parallelamente, la sensibilizzazione del pubblico all’uso sicuro dei monopattini elettrici rimane fondamentale. Campagne educative mirate potrebbero informare i conducenti sulle Norme specifiche di circolazione, promuovendo comportamenti consapevoli e responsabili sia tra i conducenti di monopattini che tra gli automobilisti.
Infine, è cruciale considerare modifiche alle linee guida di progettazione dell’infrastruttura stradale. L’adattamento delle corsie e l’implementazione di aree specifiche per i monopattini, insieme a una chiara segnaletica stradale e ad azioni coordinate mirate a garantire il rispetto dei limiti di velocità, possono contribuire in modo significativo a promuovere una maggiore sicurezza per tutti gli utenti della strada con particolare riferimento alla categoria delle utenze vulnerabili alla quale appartengono a pieno titolo anche gli utenti dei monopattini elettrici.

Bibliografia
[1]. D. Glavić, A. Trpković, M. Milenković, S. Jevremović – “The E-Scooter Potential to Change Urban Mobility – Belgrade Case Study”, Sustainability, 2021, 13, 5948.
[2]. ISTAT – “Incidenti stradali”, Anno 2021.
[3]. Q. Ma, H. Yang, A. Mayhue, Y. Sun, Z. Huang, Y. Ma – “E-Scooter safety: The riding risk analysis based on mobile sensing data”, Accident Analysis & Prevention, 2021. 151:105954.
[4]. T.K. Trivedi, C. Liu, A.L.M. Antonio, N. Wheaton, V. Kreger, A. Yap, D. Schriger, J.G. Elmore – “Injuries associated with standing electric scooter use”, JAMA Netw, 2019, 2 (1).
[5]. D.L. 10/09/2021 n° 121 – “Disposizioni urgenti in materia di investimenti e sicurezza delle infrastrutture, dei trasporti e della circolazione stradale, per la funzionalità del Ministero delle Infrastrutture e della Mobilità sostenibili, del Consiglio Superiore dei Lavori Pubblici e dell’Agenzia Nazionale per la Sicurezza delle Infrastrutture stradali e autostradali”, G.U. n° 217 del 10 Settembre 2021.
[6]. T. De Ceunynck, E. Polders, S. Daniels, E. Hermans, T. Brijs, G. Wets – “Road Safety Differences between Priority-Controlled Intersections and Right-Hand Priority Intersections. Transportation Research Record: Journal of the Transportation Research Board, 2013.
[7]. G. Pulvirenti, T. De Ceunynck, S. Daniels, N. Distefano, S. Leonardi – “Safety of bicyclists in roundabouts with mixed traffic: video analyses of behavioural and surrogate safety indicators”, Transportation Research Part F: Traffic Psychology and Behaviour, 2021, 76, 72-91.
[8]. A. Laureshyn, M. de Goede, N. Saunier, A. Fyhri – “Cross-comparison of three surrogate safety methods to diagnose cyclist safety problems at intersections in Norway”, Accident Analysis and Prevention, 2017. 105:11-20.
[9]. C. Johnsson, A. Laureshyn, T. De Ceunynck – “In search of surrogate safety indicators for vulnerable road users: a review of surrogate safety indicators”, Transport Reviews, 2018, 38(6), 765-785.
> Se questo articolo ti è piaciuto, iscriviti alla Newsletter mensile al link http://eepurl.com/dpKhwL <