Il progetto di ricerca CLASS, Coordinating Edge and Cloud for Big Data Analytics (https://class-project.eu/), nasce da un consorzio formato da centri di ricerca (il Barcelona Supercomputing Center e l’Università degli Studi di Modena e Reggio Emilia), dal Comune di Modena e da tre grandi Aziende: Maserati, IBM e AtoS. Il progetto è stato finanziato dalla Comunità Europea con 3,9 milioni di Euro nell’ambito del programma di finanziamento Horizon 2020 per l’innovazione e la ricerca.
La motivazione dalla quale è nato il progetto CLASS viene dalla necessità crescente di nuove architetture di data analytics, che riescano a gestire l’incremento esponenziale nel volume, diversità e velocità di acquisizione dei dati delle Smart City più all’avanguardia.
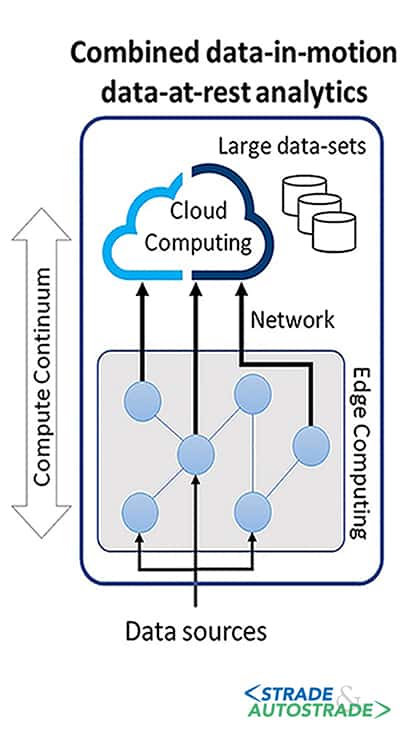
Questi dati provengono da quello che si è definito “compute continuum”, cioè l’insieme di infrastrutture di calcolo e rete che partono dai server nel cloud e arrivano fino all’edge più pervasivo.
I sensori e dispositivi IoT infatti sono sempre più intelligenti e computazionalmente avanzati, dotati anche di coprocessori per il calcolo parallelo come GPU e FPGA.

Una nuova architettura
Un’infrastruttura così variegata, fatta di diversi strati di software e hardware, è di difficile gestione.
Ecco dove il progetto CLASS ha cercato di inserirsi, escogitando una nuova architettura di tipo “fog” nella quale edge e cloud vengono combinati e coordinati, permettendo analisi sia di tipo “data in motion”, ovvero su dati in tempo reale, sia “data at rest”, cioè la creazione di modelli predittivi basati su serie di dati temporali.
Per questo è stato necessario sviluppare da zero una intera software architecture distribuita.
In questa architettura sono state integrate tecnologie che provengono da diversi ambiti in un unico framework. Del mondo HPC (High Performance Computing), BSC ha sfruttato le tecniche di distribuzione del lavoro su diversi nodi edge e cloud.
Dal dominio embedded, invece, sono state prese le analisi temporali per il mantenimento dei requisiti real time e i modelli di programmazione parallela, per sfruttare le molteplici piattaforme eterogenee che sono a disposizione.
Grazie all’esperienza di IBM e Atos nei sistemi cloud è stato possibile adottare le più avanzate tecniche di big data analytics. Dal momento che l’ambito di applicazione più naturale per quanto descritto fin qui è per l’appunto quello delle Smart City, il Comune di Modena, sfruttando un progetto sperimentale per lo sviluppo della mobilità smart e dei veicoli autonomi, ha messo a disposizione un’area di circa un kilometro quadrato, denominata MASA (Modena Automotive Smart Area https://www.automotivesmartarea.it/), dove è stata integrata un’apposita infrastruttura.

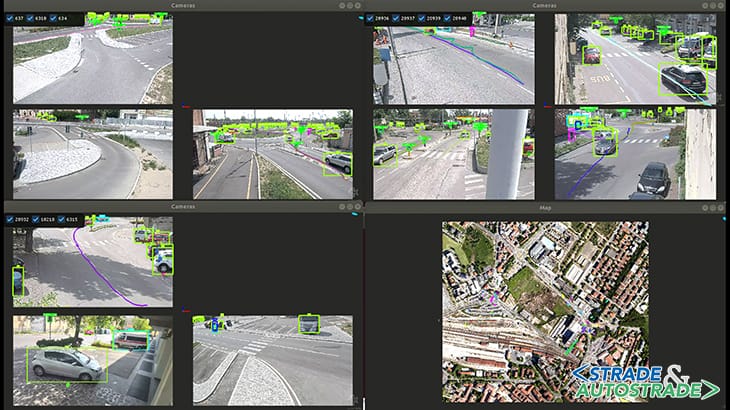
Per la parte di connettività sono presenti fibra ottica, una rete 4G privata e una 5G verrà presto installata; i sensori sono di diverse tipologie, tra le quali sensori di inquinamento, di parcheggio, una trentina di telecamere tradizionali e altrettante intelligenti.
In qualità di partner esperto di sistemi embedded e real time, il laboratorio HiPeRT Lab (https://hipert.unimore.it/) dell’Università di Modena, guidato dal Prof. Marko Bertogna e dallo scrivente, referente del progetto, ha equipaggiato con hardware e software allo stato dell’arte tre veicoli messi a disposizione da Maserati.
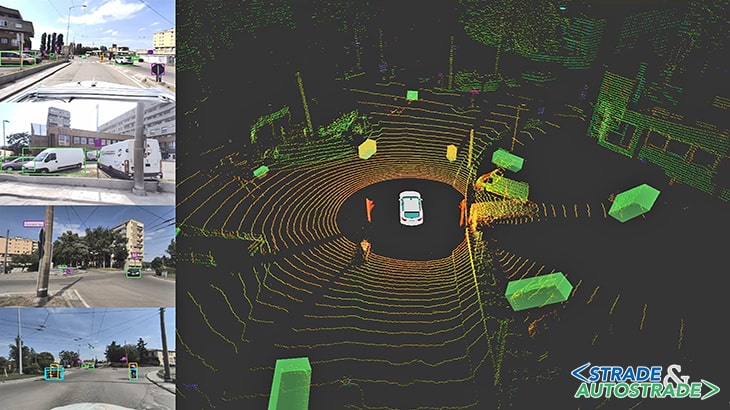
I veicoli hanno molti sensori come LiDAR, telecamere ad alta risoluzione e GPS differenziali per osservare l’ambiente intorno a loro, oltre alla necessaria parte di computazione con board NVIDIA automotive e sistemi di connettività per permettere la comunicazione V2I e V2V.
Prevedere le collisioni
Il caso d’uso maggiormente sfidante per il progetto è quello di prevedere possibili incidenti stradali. L’idea è di partire dalla detection degli utenti stradali dalle immagini delle telecamere, calcolare la loro posizione GPS tramite un procedimento geometrico chiamato omografia, predire i loro futuri movimenti e quindi la possibilità di collisioni. Se ciò dovesse accadere, si invia un messaggio di allerta ai veicoli connessi nell’area e coinvolti nel possibile urto.
Il tutto deve essere eseguito in meno di 100 ms, per permettere un tempo di risposta adeguato al conducente o al sistema di assistenza alla guida avanzato, che in questo modo possono tempestivamente intervenire per evitare la collisione.
In una Smart City “tradizionale”, la latenza introdotta dalla compressione video delle telecamere connesse alla rete, tipicamente H264 su protocollo rtsp, è tale da includere direttamente un ritardo dell’ordine di 200 ms.
Le immagini vengono poi analizzate nel cloud tramite hardware performante che fornisce risultati in meno di 10 ms e restituisce dei metadati anonimi, che vengono poi spediti al veicolo attraverso la rete 4G privata. Questa sequenza di operazioni non può ovviamente sperare di chiudersi nei 100 ms ipotizzati, dato il ritardo iniziale.
In CLASS, grazie all’orchestrazione dei compiti da eseguire sull’intero “compute continuum”, vengono sfruttate sia le telecamere smart che i veicoli connessi come sensori mobili per avere le immagini direttamente nella memoria del dispositivo in meno di 10 ms.
Qui viene svolta una parte del calcolo di detection tramite reti neurali e di previsione delle traiettorie e, se necessario, viene delegata una parte del calcolo sui fog node, inviando in quest’ultimo caso solamente i metadati anonimi elaborati, riducendo quindi la bandwidth necessaria e la latenza.
Nei fog node o nei server cloud si può quindi terminare la previsione di possibili incidenti e restituire le informazioni necessarie ai veicoli entro il tempo prefissato.
Nello stesso tempo, i metadati ottenuti si possono utilizzare nel cloud anche per generare modelli predittivi di traffico, inquinamento o altre statistiche di interesse alla municipalità.
Per il futuro, altri tipi di applicazioni in ambito smart city che possono essere facilmente implementabili grazie alla software architecture sviluppata in CLASS comprendono in primo luogo la gestione intelligente del traffico, come la creazione di onde verdi per veicoli d’emergenza o il ridirezionamento del traffico in caso di ingorghi.
In secondo luogo, si potrà dare supporto ai più innovativi sistemi ADAS (Advanced Driver-Assistance Systems) per gestire le intersezioni in modo automatico, senza necessità di semafori, o prenotare i parcheggi che vengono identificati come liberi dal sistema e indirizzarvi i veicoli.
> Se questo articolo ti è piaciuto, iscriviti alla Newsletter mensile al link http://eepurl.com/dpKhwL <