
Come già presentato in precedenti Notiziari (si vedano i fascicoli n° 138 Novembre/Dicembre 2019 a pag. 234 e n° 139 Gennaio/Febbraio 2020 a pag. 227), il simulatore di guida in realtà virtuale dell’Università degli Studi Roma Tre si propone da sempre come un avanzato strumento capace di assistere la progettazione e la gestione in sicurezza delle infrastrutture stradali tramite interessanti ricerche e sperimentazioni.
Negli ultimi anni, abbiamo apprezzato come l’avanzamento tecnologico richiesto sia per le nostre infrastrutture che per i veicoli necessiti sicuramente di strumenti innovativi e capaci di testare “virtualmente” soluzioni che non possono generalmente essere testate dal vero, a causa dell’impossibilità di ripetere esattamente alcune condizioni e soprattutto per i profili di insicurezza che si potrebbero generare.
Un ulteriore interessante utilizzo del simulatore prevede la possibilità di affiancarsi alle sperimentazioni sul campo che sono ad oggi consentite previo nulla osta delle autorità competenti, ad esempio nel caso di sperimentazioni per veicoli autonomi.
È allo stesso tempo necessario ricordare come l’indagine del comportamento dell’utente alla guida per l’utilizzo di dette avanzate tecnologie risulti quanto mai necessaria sia per una preventiva verifica di efficacia delle stesse che per l’ottimizzazione del funzionamento del sistema, prima che lo stesso trovi spazio nelle applicazioni industriali di sviluppo.
I contributi di seguito presentati vertono su differenti applicazioni di interesse sviluppate dai Ricercatori del LASSTRE anche nell’ambito di Tesi di Laurea Magistrale in Ingegneria delle Infrastrutture Viarie e Trasporti, su argomenti quali l’interazione dei driver con veicoli autonomi o tradizionali, l’analisi di particolari zone o manovre generalmente critiche nella letteratura come “dilemma e merging zone” o manovre di sorpasso e di car-following, oggetto di avanzati studi di sicurezza, i cui risultati verranno commentati in successive edizioni del notiziario e in articoli scientifici di settore.

L’interazione dei driver con i veicoli autonomi o tradizionali
Lo studio nasce dalla consapevolezza che spesso i conducenti tendono ad adattare il proprio comportamento di guida in funzione delle azioni effettuate dal veicolo che li precede.
Considerando però che – a differenza dei driver tradizionali – gli AV (Autonomous Vehicles) rispettano rigorosamente le regole imposte dal Codice della Strada e tendono ad essere particolarmente cautelativi nei confronti degli altri veicoli, si potrebbe verificare il paradosso che questo comportamento – spesso non compreso dagli altri conducenti – potrebbe causare un aumento del livello di disagio per gli utenti della rete.
Non è ancora ben chiaro nella letteratura che supporta il graduale inserimento di veicoli autonomi nelle nostre reti se gli utenti percepiscano effettivamente questa differenza di comportamento di guida oppure se siano influenzati dalla presenza di un AV riconoscibile.
In questo contesto, l’utilizzo del simulatore di guida ha permesso la riproduzione di situazioni particolari in un ambiente controllato, senza sottoporre l’utente ad alcun tipo di rischio, in condizioni che altrimenti non sarebbero facilmente sperimentabili nella realtà, nonostante il Decreto dell’allora Ministero delle Infrastrutture e dei Trasporti in materia di Smart Road (70/2018) abbia regolamentato la sperimentazione di veicoli autonomi su strada.
Il fenomeno di car-following
Si è inoltre indagato il fenomeno di car-following tra veicoli autonomi e tradizionali al fine di studiare contemporaneamente il livello di disagio indotto e l’affidabilità e accettazione che gli utenti ripongono nella nuova tecnologia, imponendo agli stessi di seguire alternativamente un veicolo tradizionale e un AV, una volta ben riconoscibile tramite un contrassegno e una volta avente l’aspetto di un normale veicolo tradizionale.
Questa predisposizione consente non solo di capire la reazione degli utenti tradizionali all’introduzione degli AV su strada, ma anche la formulazione di un nuovo modello di car-following adatto a descrivere le situazioni a traffico misto con un veicolo autonomo come leader.
Per monitorare i comportamenti sopra descritti, è stato costruito uno scenario autostradale e sono stati sottoposti gli sperimentatori al fenomeno di car-following in diverse condizioni: una di moto stazionario caratterizzata da accelerazioni e decelerazioni del veicolo leader di piccola entità, in condizioni particolari, tra cui svincoli e cantieri lineari, e una condizione critica caratterizzata da una brusca frenata causata da un improvviso rallentamento della circolazione.
Le sperimentazioni stanno fornendo i primi risultati che verranno discussi, come già detto, nelle successive edizioni del Notiziario.


Il distanziamento nelle merging zone
Questa sperimentazione ha come oggetto lo studio delle merging zone autostradali e mira a valutare l’efficacia delle contromisure volte al miglioramento del livello di sicurezza connesso alle interferenze tra flussi veicolari.
Con l’obiettivo di gestire in sicurezza le interferenze tra il flusso principale e quello proveniente, ad esempio, dalle corsie di immissione, sono state implementate varie misure precauzionali finalizzate a garantire un corretto distanziamento tra i veicoli.
Lo scenario sviluppato al simulatore si estende per circa 25 km durante i quali il driver attraversa sei diverse merging zone in ambito autostradale. Prima di ciascuna merging zone, l’utente sarà invitato a seguire delle indicazioni che lo indurranno a spostarsi sulla corsia di destra dove resterà per tutta l’area di merging, in quanto la manovra di lane changing (in questo caso il cambiamento di corsia, da quella di destra a quella centrale) verrà a quel punto impedita da un flusso molto sostenuto presente sulla corsia centrale.
Tramite la presenza di alcuni elementi successivi (contromisure inserite per informare e aiutare il driver) si valuterà il comportamento degli utenti rispetto alle configurazioni di base.
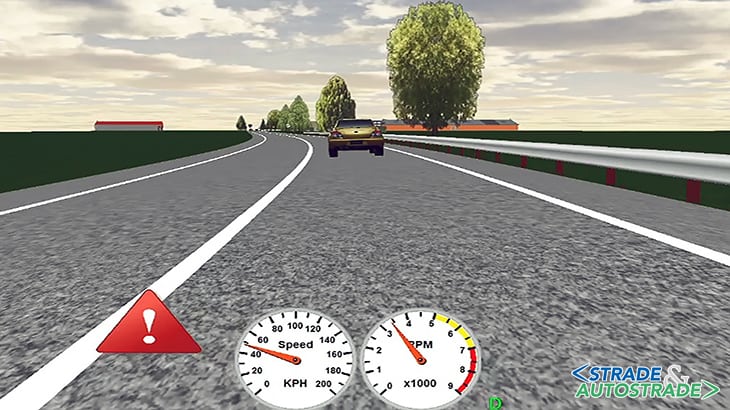
Nell’ambito della sperimentazione, ulteriori misure volte a informare e/o a aiutare il driver nella valutazione del giusto distanziamento longitudinale che deve essere mantenuto tra i veicoli, sono state realizzate tramite elementi come la realtà aumentata (AR), supporti vocali e avvisi precauzionali tramite Head-Up Display implementato al simulatore con un avviso grafico tale da riprodurre le informazioni che verrebbero proiettate nella realtà sul parabrezza del veicolo e che permettono al guidatore di non distogliere lo sguardo dalla strada, evitando possibili fenomeni di distrazione.
Come si vede nella Figura 2A sopra, inoltre, una grafica in AR – costituita da barre orizzontali di colore variabile dal rosso al verde – permette all’utente di regolare la distanza rispetto al veicolo che lo precede e valutare la disponibilità o meno di spazio necessario ad effettuare le manovre in sicurezza. Nella Figura 2B sopra, tale obiettivo è regolato dalla presenza di un pannello a messaggio variabile e di un’apposita segnaletica orizzontale.
La lane-changing in approccio alle merging zone
Anche questo lavoro ha come obiettivo l’analisi dell’efficacia, in termini di funzionalità e sicurezza, di contromisure atte a eliminare l’interferenza che in ambito autostradale viene a concentrarsi maggiormente nelle cosiddette merging zone, zone in cui le rampe di ingresso confluiscono nella viabilità principale.
Al fine di eliminare completamente l’interferenza tra i due flussi, sono state studiate contromisure che, in approccio alla zona di merging, suggeriscono agli utenti che percorrono la corsia di destra la necessità di effettuare il lane-changing, in modo da liberare completamente la corsia di destra, facilitando l’immissione dei veicoli che provengono dalla rampa.
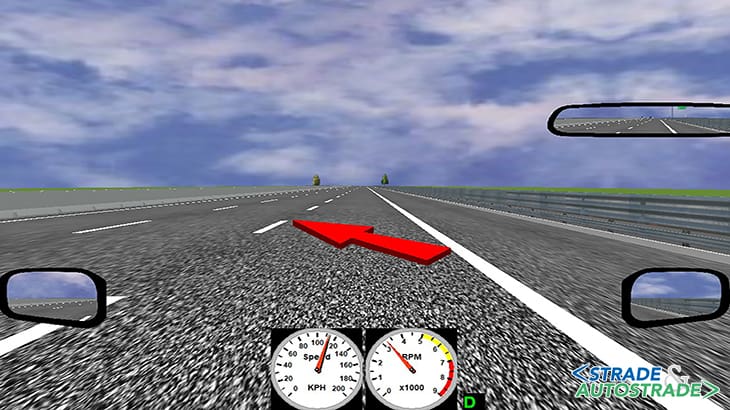

Nell’ambito della sperimentazione sono stati analizzati sia sistemi di avviso attualmente realizzabili, che avvertono dall’esigenza di cambiare corsia dapprima con un pannello a messaggio variabile (Figura 3B) e successivamente tramite segnaletica orizzontale (Figura 3A), sia tecnologie innovative di assistenza alla guida attuabili solo in ambiente connesso e cooperativo (Intelligent Transport System).
Poiché la manovra di lane-changing può essere più o meno favorita a seconda delle condizioni di traffico che caratterizzano la corsia adiacente, la valutazione dei benefici generati dalle varie contromisure rispetto alla baseline condition (nessuna contromisura implementata) è stata studiata realizzando tre scenari caratterizzati da valori di flusso differenti, ovvero in termini di distanziamento medio tra i veicoli.
Il dilemma delle zone in prossimità di intersezioni semaforizzate
Questa ricerca è finalizzata ad analizzare il comportamento dei conducenti in approccio a un’intersezione semaforizzata all’insorgenza del segnale giallo. Tale situazione è infatti particolarmente critica in quanto gli utenti devono decidere se fermarsi o attraversare l’incrocio nella cosiddetta zona di dilemma (Dilemma Zone).
L’obiettivo principale di questa ricerca è analizzare al simulatore di guida il comportamento del conducente all’insorgenza del segnale giallo ed individuare la contromisura più efficace per la risoluzione della zona di dilemma nel contesto italiano.
Nella sperimentazione sono state utilizzate diverse contromisure come un timer di conto alla rovescia della fase verde, una segnaletica verticale di preavviso e sistemi di assistenza alla guida all’interno del veicolo per i quali sono in elaborazione i risultati dei test effettuati al fine di fornire una valutazione dell’efficacia degli stessi.


I due sistemi rappresentati nelle Figure 4A e 4B consistono nell’implementazione dei diversi sistemi testati. Ad esempio, visualizzando la durata residua della fase verde, il sistema informa i conducenti di quanto tempo rimane prima dell’inizio della fase di giallo, al fine di aiutarli preventivamente a prendere decisioni più sicure (Figura 4A).
Un altro sistema testato nella sperimentazione si attiva quando un veicolo si avvicina ad un’intersezione semaforizzata all’inizio del giallo ed il tempo di attraversamento, stimato in funzione della velocità, è più lungo dell’intervallo giallo: in questo caso il sistema di avviso visualizza la scritta “STOP” per incoraggiare il driver a fermarsi (Figura 4B).
Le contromisure di realtà aumentata per assistenza alla manovra di sorpasso e di car-following
Infine, nell’ambito delle applicazioni relative all’utilizzo di realtà aumentata durante la guida, sono stati sviluppati due ulteriori studi volti a valutare l’efficacia di diverse contromisure per fornire assistenza all’utente durante l’esecuzione di manovre di car-following e di sorpasso, su strade extraurbane ad unica carreggiata con una corsia per senso di marcia.
Tale obiettivo è stato raggiunto integrando le funzionalità del codice di simulazione STISIM Drive 3 con la programmazione in codice Open Module permettendo la riproduzione in realtà virtuale delle innovative tecnologie di interconnessione tra veicoli (“Vehicle to Vehicle”) e tra veicolo e infrastruttura (“Vehicle to Infrastructure”).
Nello specifico, sono stati analizzati diversi sistemi di assistenza alla guida per entrambe le manovre, che sfruttano il mutuo scambio di informazioni alla base delle tecnologie prima menzionate.
Per quanto riguarda la manovra del car-following è stata verificata l’efficacia di quattro tipologie di sistemi di assistenza. I primi due, basati sul time headway, si differenziano per la modalità di restituzione dell’avviso. Nel primo si ha una visualizzazione continua del time headway con un segnale acustico una volta superata la soglia critica, mentre nel secondo vengono restituiti un’immagine e un segnale acutisco solo nel momento in cui la soglia critica è superata.

Gli ultimi due sistemi implementati si fondano su una distanza critica, che viene calcolata tenendo conto delle condizioni di moto del veicolo di fronte; anche in questo caso sono state previste le due diverse modalità di restituzione dell’avviso prima descritte.
Nel caso del secondo studio, sono stati riprodotti in realtà virtuale due sistemi di assistenza, uno con modalità di restituzione dell’avviso discontinua ed uno continua. Entrambi, innanzitutto, analizzano la configurazione della segnaletica orizzontale per valutare ove il sorpasso è consentito o meno dal Codice della Strada.
Successivamente confrontano, istante per istante, il tempo necessario per portare a termine una potenziale manovra di sorpasso con il tempo alla collisione con il veicolo più vicino sopraggiungente nella corsia opposta. A seguito di queste elaborazioni, l’utente riceve un messaggio visivo circa la possibilità o meno di portare a termine la manovra in sicurezza.
Le diverse e numerose applicazioni sopra descritte testimoniano ancora una volta come sia possibile utilizzare il simulatore di guida in realtà virtuale per poter fornire un valido contributo alla ricerca applicata utile allo sviluppo della messa a punto di sistemi per migliorare la sicurezza della circolazione.
> Se questo articolo ti è piaciuto, iscriviti alla Newsletter mensile al link http://eepurl.com/dpKhwL <