Stream C: la soluzione GPR per la mappatura 3D dei sottoservizi
La Società IDS Georadar ha messo a punto un georadar a doppia polarizzazione e alta densità di dati per la mappatura accurata delle reti di sottoservizi
Sono molte le Organizzazioni pubbliche e private in Italia e nel resto del mondo che detengono, a vario titolo, la responsabilità della progettazione e della gestione tecnico-amministrativa e della manutenzione delle reti di sottoservizi quali acqua potabile, drenaggio di acque meteoriche, linee telefoniche, fibre ottiche, fognature, ecc…
Nell’ambito di tale attività gestionale, si configura la necessità di conoscere – con adeguata precisione – la distribuzione e l’estensione delle interferenze dei sottoservizi in un determinato areale. Queste informazioni sono spesso parziali, talvolta non disponibili, e comunque necessitano di aggiornamento continuo. In aggiunta a quanto sopra, l’accuratezza dell’informazione richiesta (posizione dei sottoservizi) e l’estensione areale delle informazioni rappresentano degli obiettivi di particolare interesse sia tecnico che logistico.
Lo Stream C è il georadar a doppia polarizzazione e alta densità di dati per la mappatura accurata delle reti di sottoservizi
Lo Stream C è il georadar a doppia polarizzazione e alta densità di dati per la mappatura accurata delle reti di sottoservizi
Il sistema Stream C
Il sistema Stream C
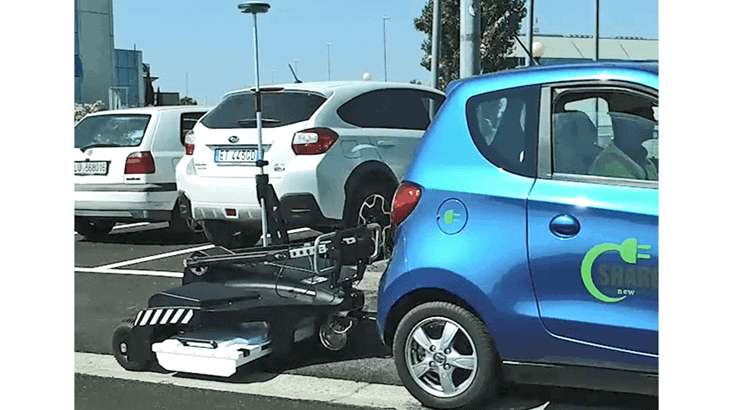
Lo Stream C trainato da veicolo
Lo Stream C trainato da veicolo
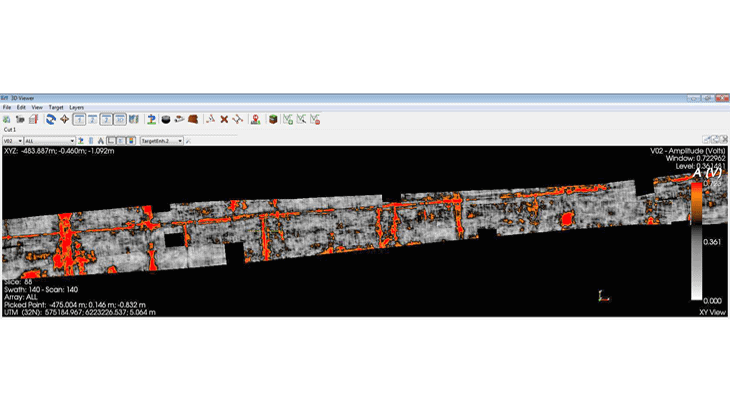
Un esempio di tomografia radar ottenuta da GRED HD 3D CAD in cui sono rappresentati in rosso le tubazioni rilevate
Un esempio di tomografia radar ottenuta da Gred HD 3D CAD in cui sono rappresentati in rosso le tubazioni rilevate
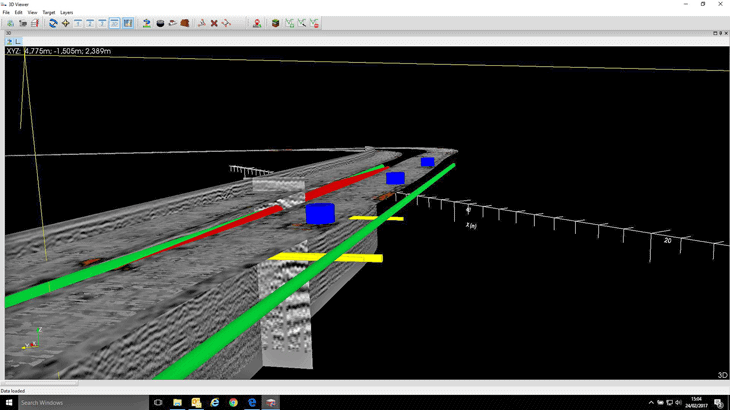
Un esempio di data set in 3D di Stream C in cui sono rappresentati gli oggetti (sottoservizi) rilevati
Un esempio di data set in 3D di Stream C in cui sono rappresentati gli oggetti (sottoservizi) rilevati
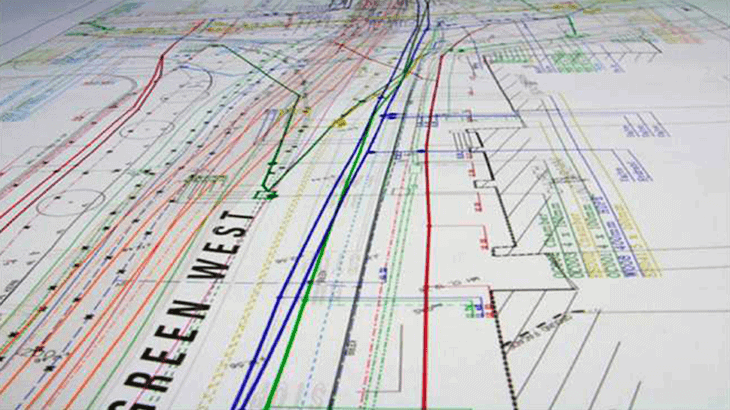
Un esempio di mappa, generata in automatico dal software Gred HD CAD, in formato AutoCAD (.dwg)
Un esempio di mappa, generata in automatico dal software Gred HD CAD, in formato AutoCAD (.dwg)
Un esempio di rappresentazione dei sottoservizi rilevati e trasferiti come file .kml su Google Earth
Un esempio di rappresentazione dei sottoservizi rilevati e trasferiti come file .kml su Google Earth
Le tecniche più frequentemente impiegate per l’identificazione nel sottosuolo di tubazioni e cavi di varia origine e destinazione d’uso possono essere divise in due grandi categorie:
tecniche dirette (scavi e trincee esplorative);
tecniche indirette (Tecniche Non Distruttive – NDT, in genere).
Il presente articolo è tratto dal fascicolo n° 122 Marzo/Aprile 2017
X Ti informiamo che abbiamo modificato alcune delle nostre politiche per rispondere ai requisiti del nuovo Regolamento Europeo per la Protezione dei Dati Personali (GDPR). In particolare abbiamo aggiornato la Privacy Policy e la Cookie Policy per renderle più chiare e trasparenti e per introdurre i nuovi diritti che il Regolamento ti garantisce. Accetta tutti i cookieImpostazioniSolo cookie tecnici
Preferenze cookies
Privacy Overview
Questo sito web utilizza i cookie per migliorare la tua esperienza durante la navigazione nel sito. Di questi cookie, quelli classificati come necessari vengono memorizzati nel suo browser perché sono essenziali per il funzionamento delle funzionalità di base del sito web. Utilizziamo anche cookie di terze parti che ci aiutano ad analizzare e capire come utilizzi questo sito web. Questi cookie vengono memorizzati nel suo browser solo con il suo consenso. Avete anche la possibilità di rinunciare a questi cookie. Ma l'opt-out di alcuni di questi cookie può avere un effetto sulla tua esperienza di navigazione.
This website uses cookies to improve your experience while you navigate through the website. Out of these cookies, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may have an effect on your browsing experience.
usato per memorizzare alcuni dettagli sull'utente come l'ID unico del visitatore
_pk_ses
30 minuti
cookie di breve durata utilizzati per memorizzare temporaneamente i dati per la visita
_pk_testcookie_domain
1 min
utilizzato per verificare se il browser del visitatore supporta i cookie
cli_user_preference
1 anno
Tiene traccia dei consensi dei cookie per il dominio corrente.
cookielawinfo-checkbox-*
1 ora
Memorizza il consenso ai cookie dell'utente.
cookielawinfo-checkbox-marketing
1 anno
Viene utilizzato per memorizzare il consenso dell'utente per i cookie della categoria "Marketing".
cookielawinfo-checkbox-necessary
1 anno
Il cookie viene utilizzato per memorizzare il consenso dell'utente per i cookie della categoria "Necessario".
cookielawinfo-checkbox-statistiche
1 anno
Memorizza il consenso ai cookie per statistiche dell'utente
CookieLawInfoConsent
1 settimana
Memorizza lo stato del pulsante predefinito della categoria corrispondente.
Funziona solo in coordinamento con il cookie primario, viewed_cookie_policy.
PHPSESSID
Sessione
Preserva gli stati dell'utente nelle diverse pagine del sito. Si attiva all'arrivo sul sito e viene eliminato quando si esce. Non contiene alcuna informazione di identificazione personale.
viewed_cookie_policy
1 ora
Questi cookie vengono utilizzati per visualizzare l’informativa sull’utilizzo dei cookie. Non registrano alcuna informazione di identificazione personale.
Questo cookie è impostato da Google e memorizzato sotto il nome dounleclick.com. Questo cookie viene utilizzato per tracciare quante volte gli utenti vedono una determinata pubblicità, il che aiuta a misurare il successo della campagna e a calcolare le entrate generate dalla campagna stessa. Questi cookie possono essere letti solo dal dominio su cui sono impostati, quindi non tracceranno alcun dato durante la navigazione in altri siti.
GoogleAdServingTest
Sessione
Questo cookie viene utilizzato per determinare quali annunci sono stati mostrati al visitatore del sito web.
GPS
2 anni
YouTube
IDE
2 anni
Utilizzato da Google DoubleClick per registrare e produrre resoconti sulle azioni dell'utente sul sito dopo aver visualizzato o cliccato una delle pubblicità dell'inserzionista al fine di misurare l'efficacia di una pubblicità e presentare pubblicità mirata all'utente.
test_cookie
1 giorno
Utilizzato da Google per verificare se il browser dell'utente supporta i cookie.
VISITOR_INFO1_LIVE
5 mesi
Cerca di stimare la larghezza di banda degli utenti sulle pagine con video YouTube integrati.
YSC
Sessione
Registra un ID univoco per statistiche legate a quali video YouTube sono stati visualizzati dall'utente.
yt-remote-connected-devices
Persistente
Memorizza le preferenze del lettore video dell'utente usando il video YouTube incorporato.
yt-remote-device-id
Persistente
Memorizza le preferenze del lettore video dell'utente usando il video YouTube incorporato.
Utilizzato da Google Analytics per generare dati statistici in forma anonima su come il visitatore utilizza il sito internet.
_gat
1 giorno
Utilizzato da Google Analytics e Google Tag Manager per generare dati statistici in forma anonima su come il visitatore utilizza il sito internet.
_gat_gtag_UA_#
1 ora
Utilizzato da Google Analytics e Google Tag Manager per generare dati statistici in forma anonima su come il visitatore utilizza il sito internet.
_gat_gtag_UA_19362258_1
1 ora
Questo cookie è impostato da Google e viene utilizzato per distinguere gli utenti.
_gid
1 giorno
Utilizzato da Google Analytics per generare dati statistici in forma anonima su come il visitatore utilizza il sito internet.
CONSENT
2 anni
Questi cookie sono impostati tramite video youtube incorporati. Essi registrano dati statistici anonimi su, ad esempio, quante volte viene visualizzato il video e quali impostazioni vengono utilizzate per la riproduzione.Non vengono raccolti dati sensibili, a meno che non si acceda al proprio account google, in quel caso le scelte sono collegate al proprio account, ad esempio se si fa clic su "mi piace" su un video.