
![]() Per la versione in Italiano: https://www.stradeeautostrade.it/incontri-e-interviste/tom-alkim-luomo-che-lavora-per-la-guida-autonoma-in-europa/
Per la versione in Italiano: https://www.stradeeautostrade.it/incontri-e-interviste/tom-alkim-luomo-che-lavora-per-la-guida-autonoma-in-europa/
One of the most important challenges awaiting Italy and Europe in the coming years is that of the automated driving. The last October, attending a conference on Smart Mobility organized in Turin by Sina SpA in collaboration with the European ITS Platform (see “Strade & Autostrade” n. 138, November/December 2019, page 212), we got to know one of the Speakers.
We are talking of Tom Alkim from Holland, Policy Officer of the European Commission for Automated and Connected Driving at the Directorate General for Research and Innovation: recently he accepted our invitation to deepen these topics with “Strade & Autostrade”.
“Strade & Autostrade”: “You have a wide experience in C-ITS and driving automation’s fields and you have been working for years at Rijkswaterstaat, which – among the Institutions of the various Member Countries – can be considered one of the most pro-active and innovative for ITS and Smart Roads. Can you thoroughly describe which is your role nowadays in the European Commission and which are the most important aspects that you have brought with you from the previous experiences in the Netherlands?”.
“Tom Alkim”: “Within the European Commission, I work for the Directorate-General for Research & Innovation which is responsible for the EU policy on research, science and innovation, with a view to help create growth and jobs and tackle our biggest societal challenges.
The latter, tackling societal challenges related to transport in general and smart mobility, in particular, was already one of my roles within Rijkswaterstaat, the executive branch of the Dutch Ministry of Transport and Water Management.
I was part of the core team, with members of the Ministry, Rijkswaterstaat and the Netherlands Vehicle Authority (RDW), that was responsible for putting smart mobility on the political agenda during the Dutch Presidency of the European Union in the first half of 2016, with the Declaration of Amsterdam [1] and the European Truck Platooning Challenge [2].

Within this core team, some of my responsibilities were the Dutch Knowledge Agenda for Automated Driving and making sure that we would learn from our projects and initiatives, after all our motto was “learning by doing”.
As an employee of Rijkswaterstaat, and thus the national road operator, my focus has been on the road operator’s perspective in the field of connected and automated driving and what they can do to facilitate and possibly accelerate its deployment. Road operators do not make automated vehicles, but they can make it happen.
This is mainly related to the role that both physical and digital infrastructure play in the so-called Operational Design Domain (ODD) of connected and automated vehicles (see intermezzo).
As a seconded national expert, I joined the European Commission in December 2018 to be a Policy Officer for Connected & Automated Driving at the Future Urban & Mobility Systems unit of the Directorate-General for Research & Innovation.
Together with my colleagues we’re making sure that the available budget for research and innovation projects and initiatives is spend wisely by identifying the relevant topics. Both for the current Horizon 2020 and the upcoming Horizon Europe framework.
This is of course also done by consulting various stakeholders, for instance in the EU single platform for open road testing of CCAM (Connected, Cooperative & Automated Mobility) which was launched by the Commission in the summer of 2019”.
“S&A”: “How important is the concept of cooperation in the European policies regarding autonomous drive and innovative transports and, in this field, which is the current situation concerning the relationship between the Member Countries?”.
“Tom Alkim”: “Cooperation is very important to make the deployment of Connected & Automated Driving a reality. As noted before in the context of the operational design domain framework, more than one stakeholder can impact the shape and size of this and therefore play a role in optimizing the set of conditions under which connected & automated driving is possible.
In general, you could say there are at least three conditions to be fulfilled in order to have a successful deployment. It starts with the enabling technology (e.g. sensors, software, etc.) which makes it possible to drive connected & automated, academia and industry are working hard to make this happen.
This has to be well integrated in the current “mobility ecosystem” where both physical and digital infrastructure and other forms of mobility are present, stakeholders such as road operators, mobility service providers and authorities have a role in this.
In addition to this, an apt legal framework is key to allow connected and automated vehicles on the road. Preferably one that has legal consistency with coherent international, European and national rules and sufficient flexibility to accommodate innovation.
To achieve this, Member States, the European Commission and Industry are working together, for instance, within the United Nations Economic Commission for Europe (UNECE).

In order to fully reap the societal benefits of connected and automated driving, it is also necessary to have people actually trust and use the technology and services in such a way that society embraces it. Therefore, trustworthy and human-centric development, deployment and use of connected and automated driving in a sustainable manner is paramount. In my opinion, this is only possible if all stakeholders, including the Member States and European Commission work together”.
“S&A”: “Few months ago the EU Institutions reached a temporary political agreement on a new edition of the General Safety Regulation, which settles that in Europe from 2022 about 30 new technologies (including the black box) will be compulsory for all vehicles, in order to protect passengers, pedestrians and cyclists and with the aim to reduce to zero the deaths and injuries by 2050. Can you disclose if these measures will be issued as European regulation (and not as a guideline) so that the Member Countries will be obliged to apply them without the need of incorporating laws?”.
“Tom Alkim”: “The General Safety Regulation is now published [3], and its provisions are distributed between implementing acts and delegated acts. Which means that the new requirements will be proposed in these acts for the new functions that the Member States will have to implement in their national law.
This new General Safety Regulation for vehicles will ensure that several safety and driver assistance features, such as Intelligent Speed Assistance, Driver drowsiness and attention warning, Emergency lane keeping and Advanced emergency braking will become mandatory for new vehicles.
This regulation will become applicable in 2022. The regulation will also provide the legal basis for the approval of connected & automated vehicles. It empowers the Commission to adopt implementing acts relevant for automated vehicles, concerning e.g. cybersecurity of vehicles and monitoring availability of the driver or installing an event data recorder to clarify who was driving (meaning the vehicle or the driver) in case of an accident.
In order to prepare relevant implementing rules, the Commission is reviewing all available technical standards. Pending the adoption of the implementing measures of the new General Safety Regulation, in February 2019, the Commission agreed with Member States on guidelines on the exemption procedure for the EU approval of automated vehicles.
The guidelines provide rules for the Member States to follow in their ad-hoc safety assessments for the approval of autonomous technologies. In parallel, taking into account the global dimension of the automotive sector and importance of developing harmonised standards for increasingly automated vehicles, the Commission spearheads efforts, working jointly with third countries, to swiftly adopt new international legal framework under the auspices of the UNECE, as mentioned before”.
“S&A”: “Which consequences do you expect from the July decision of the European Parliament, that canceled the G5 short range technology in order to move to CV2X? If the benefits of the C-ITS will not be available on the market before a further wait of some years, in terms of deaths and injuries the statistics for car accidents are likely to unchange. Which is your opinion concerning it?”.
“Tom Alkim”: “The goal of the European Commission is to make a step-change in road safety. To attain this objective, as a first milestone, the Commission adopted new rules for cooperative intelligent transport systems (C-ITS) on EU roads through a Delegated Act.
Following the support from the European Parliament, the Commission regrets the objection from Council to this Delegated Act on C-ITS whose purpose is to save lives.
This can be done by connecting all road users, all vehicles and all traffic managers to allow them to automatically exchange messages, share information on potentially dangerous situations in real time and avoid accidents, also called cooperative safety.
First implementers of Standardised C-ITS services from vehicle manufacturers, road authorities and road operators are addressing this on a large-scale with the provision of Day-1 C-ITS services (e.g., stationary vehicle warning, emergency electronic brake light, road works warning).
The implementation is based on WiFi (ITS-G5) technology to improve road safety and reduce traffic congestion for European citizens as of today. The effectiveness of C-ITS is optimised by combining the ITS-G5 and standard cellular networks as part of a hybrid communication approach, which will reach more road users and larger portions of the european road infrastructure.
This is why European C-ITS stakeholders such as road authorities, road operators, vehicle manufacturers, ICT industry and the agriculture machinery and railway equipment sector are jointly committed to C-ITS, that is based on available and proven interoperable harmonized specifications, standards and technologies.
Future technical innovations in C-ITS are welcomed and should be combined with existing, proven technologies by complementing the defined hybrid communication approach.
The mature ad-hoc wireless technology ITS-G5 (no network coverage or subscriptions required, particularly in the rural areas) and cellular networks (3G/4G) may therefore be supported by future 5G developments, which will provide Europe with further technology delivery options.
This technology neutral approach will support the two “Cs” in Cooperative, Connected, and Automated Mobility (CCAM) to enhance mobility and more specifically improve road safety and efficiency within Europe”.

“S&A”: “In terms of road accidents, the Italian situation requires an immediate action. It would be necessary, for example, to start to modify the road rules in order to incorporate the ADAS (Advanced Driver Assistance Systems) technologies, but this hasn’t been done yet. In light of such a scenery, what do you think Italy can do to speed these internal processes, possibly also with the UE support?”.
“Tom Alkim”: “A vast range of ADAS are already commercially available on many different vehicles, so there’s no need to change the rules to allow the use of these systems. However, the use of ADAS is still relatively low and perhaps their existence and benefits may be promoted more.
A recent study in the Netherlands revealed for instance that the penetration rate of ACC (more than 20 years commercially available) was less than 3% in the Dutch fleet. Moreover, most users (around 80%) did not use the system all the time and some were even unaware of having the system on board.
So the actual impact of ADAS in reality can be lower than the sales figures or penetration levels seem to indicate”.
“S&A”: “Do you want to recap the contents of the Communication from the Commission regarding connected and automated mobility, which was presented few months ago?”.
“Tom Alkim”: “As part of the Third Mobility Package, the Commission presented on 17 May 2018 its Communication “On the road to automated mobility: an EU strategy for mobility of the future” [4].
With this Communication, the Commission proposed a strategy aiming to make Europe a world leader for connected and automated mobility systems and it delivers an ambitious agenda to prepare the ground for an optimal roll-out of these technologies. In terms of R&I funding, the Communication proposed, amongst others, the following main actions:
- Develop, in close cooperation with the Member States and industry stakeholders, a roadmap including a concrete plan for short, medium and long-term research and innovation actions. This is done and the resulting STRIA roadmap on Connected and Automated Transport was published in April 2019[5].
- Assess the long long-term effects of automated mobility, in particular on employment. A study was launched by DG RTD in 2019.
- Set up one single EU wide platform grouping all relevant public and private stakeholders to coordinate open road testing and making the link with pre-deployment activities. This was addressed by launching the EU single platform for open road testing of CCAM (Connected, Cooperative & Automated Mobility) in the summer of 2019.
- Establish a partnership under the next European multiannual financial framework to give a clear long-term framework to the strategic planning of research and pre-deployment programmes on driverless mobility at EU and national levels. This is currently an ongoing process.
- Provide an EU Forum to address specific ethical issues raised by automated mobility. I would like to come back to this issue in the last question of this interview”.
“S&A”: “Which is your opinion on the undergoing research on the flying vehicles? Do you think they can have a significant impact on future mobility?”.
“Tom Alkim”: “Yes, this can be disruptive. The question is whether for the good or for the bad and this depends on the perspective with which you look at it. A few months ago, I visited the ITS World conference in Singapore where Volocopter, an urban air taxi company, made its first ever urban test flight with their prototype over the Marina Bay.
Nevertheless, if you look at the amount of additional energy that is needed to transport mass (whether it’s a person or a package) through the air compared to over the road, I wonder how sustainable this is. However, I am not an expert in this field, so I should keep my feet on the ground regarding predictions on flying vehicles…”.
“S&A”: “In the media we often hear about concerns of automated driving related to the so-called trolley dilemma where an automated vehicle, confronted with an impending accident, has to make a decision on who or what to hit (there are many variations) in order to mitigate the impact of the accident. Does the EU commission take these aspects into account?”.
“Tom Alkim”: “The European Commission is strongly committed to support the deployment of connected and automated driving technologies in Europe by helping provide the right legal, ethical and regulatory framework.
In order to properly manage the transition to connected and automated mobility, we need to pay close attention to key societal, ethical and environmental concerns, which are essential for public acceptance and trust.
Ethical considerations and shared moral values can be used to shape a strong future vision for connected and automated driving, and should be construed as stimulus and opportunities for innovation, not as impediments and barriers.
As such, there needs to be a realistic and pragmatic ethical framework ready to support all relevant stakeholders in the different stages of the design, development and deployment of connected and automated driving.
As mentioned before, in its Communication “On the road to automated mobility: An EU strategy for mobility of the future”, the European Commission announced the creation of a dedicated Expert Group to address specific ethical issues raised by connected and automated driving, this was done in June 2019.
The main tasks of this group are to stimulate a discussion at European level and across disciplines, in order to provide practical support to relevant stakeholders and assist policy makers and designers in the safe, sustainable and efficient transition to connected and automated mobility.
The Expert Group consists of 14 highly qualified experts working independently and in the public interest. These experts are specialised in the field of ethics and connected and automated driving from all over Europe.
The first formal meeting of the Expert Group took place in June 2019, and a final report including recommendations and possibly ethical guidelines for the development of connected and automated mobility in the European Union is expected by June 2020”.
“S&A”: “Would you describe us the key concepts of the connected and automated drive, starting from the Operational Design Domains?”.
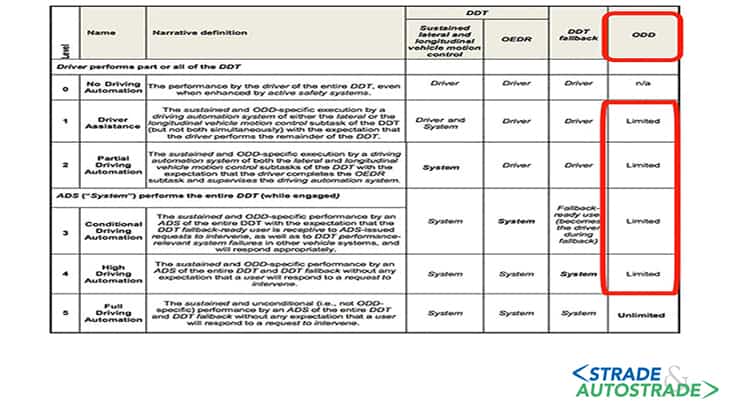
“Tom Alkim”: “The Society of Automotive Engineers (SAE) in 2013 released (and twice updated since) a report defining key concepts related to the increasing automation of on-road vehicles. Central are six levels of driving automation:
- 0 (no driving automation);
- 1 (driver assistance);
- 2 (partial driving automation);
- 3 (conditional driving automation);
- 4 (high driving automation);
- 5 (full driving automation).
The descriptions of these levels, the related roles of the automated system and the human driver in Object and Event Detection and Response (OEDR) and Dynamic Driving Task (DDT) fall back as well as the Operational Design Domains (ODD) are summarized in Figure 6 above.
In order to describe the limitations under which the automated driving system can be operated as intended, SAE introduced the concept of the Operational Design Domain (ODD). The term defines the boundaries of the system functionality at a certain level of automation, e.g. a particular road environment.
With the concept of automation levels and ODD, relevant cases can be distinguished as follows: Level 2 automation applies to autopilot systems with permanent supervision by the driver e.g. for the ODD of an expressway that are available on the market, now.
Level 3 automation would mean the next step of taking the driver out of the perception and response task but keeping him or her as a fall back solution for the dynamic driving task. Level 4 in contrast would mean there is a system fall back but in a limited ODD, while for level 5 the ODD would be unlimited. For the levels 1 to 4 the ODD by definition is limited.
The boundaries are not only depending on the enabling technology of the vehicle itself but also on external factors, such as physical and digital infrastructure, traffic and weather conditions.
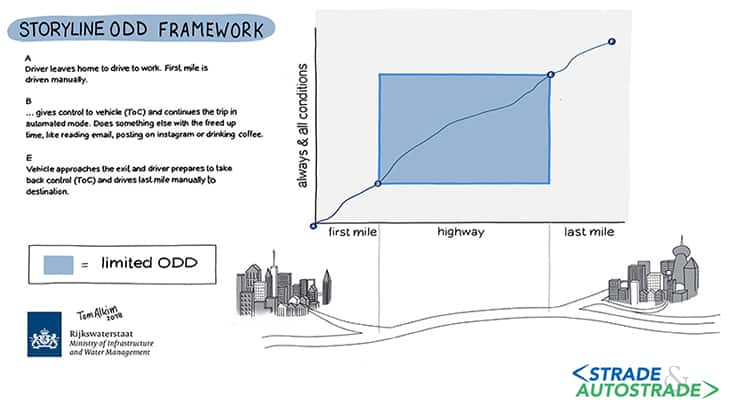
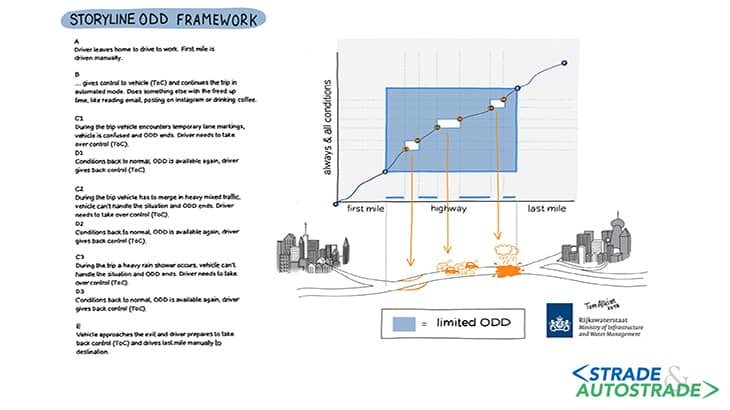
A visual representation of the ODD concept is given in Figure 7 where a driver leaves his destination in an automated vehicle (i.e. with Level 4 capabilities designed for highways) and driving it manually to the highway.
There, at the on-ramp a transition of control (ToC) takes place and the vehicle can continue the trip in automated mode, allowing the driver to sit back and relax until the designated off-ramp is reached. There, another ToC takes place and the driver continues the trip in manual mode until the destination is reached.
Unfortunately, this is a theoretic representation in most situations. In reality, a combination of factors such as the enabling technology in a vehicle (sensors, hardware, software, etc.) and many external factors, such as traffic conditions, road conditions, weather conditions, impact the shape and size of the ODD. This leads to “gaps” in the ODD (Figure 8).
This means that there are several stakeholders to be involved to determine the specific characteristics of an ODD. A car manufacturer cannot guarantee in general that a Level 4 vehicle can always drive in Level 4 mode, but only inside the ODD. And similarly, a road operator would not be able to offer a road on which a Level 4 vehicle can be guaranteed to drive in Level 4 mode because factors outside their span of control (such as adverse weather conditions) may prevent that”.
Bibliography
- Dichiarazione di Amsterdam – https://www.government.nl/topics/mobility-public-transport-and-road-safety/question-and-answer/what-is-the-declaration-of-amsterdam-on-selfdriving-and-connected-vehicles.
- European Truck Platooning Challenge – https://platooningensemble.eu/.
- Pubblicazione del regolamento di sicurezza generale (EU 2019/2144) – https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=OJ:L:2019:325:FULL&from=EN.
- Comunicazione “Sulla strada verso la mobilità automatizzata: una strategia UE per la mobilità del futuro” (COM(2018) 283 final) – https://eur-lex.europa.eu/LexUriServ/LexUriServ.do?uri=COM:2018:0283:FIN:EN:PDF.
- STRIA roadmap sul Trasporto Connesso e Automatizzato – https://ec.europa.eu/research/transport/pdf/stria/stria-roadmap_on_connected_and_automated_transport2019-TRIMIS_website.pdf.
Tom Alkim’s Curriculum Vitae
Tom Alkim is Policy Officer Connected & Automated Driving at the European Commission, Directorate General Research & Innovation. He has over 20 years of experience in the field of ITS, C-ITS and Automated Driving and was a constant factor for the Dutch Ministry of Infrastructure and Water Management at Rijkswaterstaat, the National road operator.
He was part of the core team that was responsible for the Declaration of Amsterdam and the European Truck Platooning Challenge during the Dutch EU presidency in 2016.
Now he’s working with the European Commission on advancing Connected & Automated Driving in a responsible manner to deliver societal benefits. In this capacity he:
- was co-organiser of the 2nd Second European Conference on Connected & Automated Driving (connectedautomateddriving.eu/eucad2019);
- is chair of the working group on Coordination & Cooperation of R&I and testing activities in the EU CCAM (Connected, Cooperative and Automated Mobility) Single Platform for Open Road Testing;
- is involved in setting up and facilitating an expert group to advise the European Commission on specific ethical issues raised by automated driving.
![]() Per la versione in Italiano: https://www.stradeeautostrade.it/incontri-e-interviste/tom-alkim-luomo-che-lavora-per-la-guida-autonoma-in-europa/
Per la versione in Italiano: https://www.stradeeautostrade.it/incontri-e-interviste/tom-alkim-luomo-che-lavora-per-la-guida-autonoma-in-europa/