Le misurazioni sono state effettuate in orari in cui il traffico non risulta essere quello di picco e in condizioni meteo ideali (pavimentazione asciutta). Ciascuna misurazione ha avuto una durata di circa 60 minuti. La strumentazione utilizzata ha permesso di registrare per ogni passaggio veicolare: istante (data, ora, minuti, secondi), velocità istantanea del veicolo, lunghezza del veicolo e direzione di marcia. Le singole misure di velocità registrate sono state preventivamente depurate eliminando le misure “anomale”, ottenendo il campione di riferimento per le analisi. Nello specifico, dal database di rilievo sono state escluse le misure caratterizzate dai seguenti attributi:
- (a) lunghezza ≥ 19 m (superiore alla lunghezza massima ammessa dall’art. 161 del Codice della Strada, pari a 18,5 m);
- (b) velocità ≤ 25 km/ora (ritenuta anomala per la tipologia di strada in assenza di fenomeni di congestione del traffico).
Infine, il set di dati costituente il campione di riferimento è stato filtrato con lo scopo di analizzare per ogni stazione esclusivamente valori di velocità appartenenti a veicoli leggeri (veicoli di lunghezza compresa tra 3 e 6 m) e isolati (veicoli caratterizzati da un valore di headway superiore o uguale a 5 secondi). Alla parallela attività sperimentale svolta in ambiente virtuale ha partecipato un campione composto da 34 soggetti reclutati su base volontaria secondo i seguenti criteri: possesso di valida licenza di guida da almeno cinque anni e percorrenza media annua superiore a 5.000 km. Il campione di soggetti partecipanti al processo di validazione non corrisponde al campione di guidatori che in seguito ha preso parte alla sperimentazione vera e propria. I dati di velocità sono stati costantemente registrati con una frequenza di campionamento di 0,05 s; successivamente, sono stati elaborati e presi in esame solo i valori medi di velocità.
Il confronto tra i valori medi di velocità registrati in sito e quelli registrati durante le sessioni di guida al simulatore ha evidenziato una buona corrispondenza tra il comportamento mantenuto su strada e quello registrato in realtà virtuale lungo tutto lo sviluppo del tracciato preso in esame; inoltre, nei siti di misura collocati in corrispondenza di costrizioni fisiche dettate dalla geometria dell’infrastruttura stradale (per esempio, in corrispondenza di attraversamenti pedonali rialzati, in approccio all’unica curva presente, in uscita dalla rotatoria), i risultati dell’analisi statistica effettuata (Z-Test) hanno evidenziato che i due campioni di dati comparati appartengono alla stessa popolazione con un livello di significatività pari al 95%.
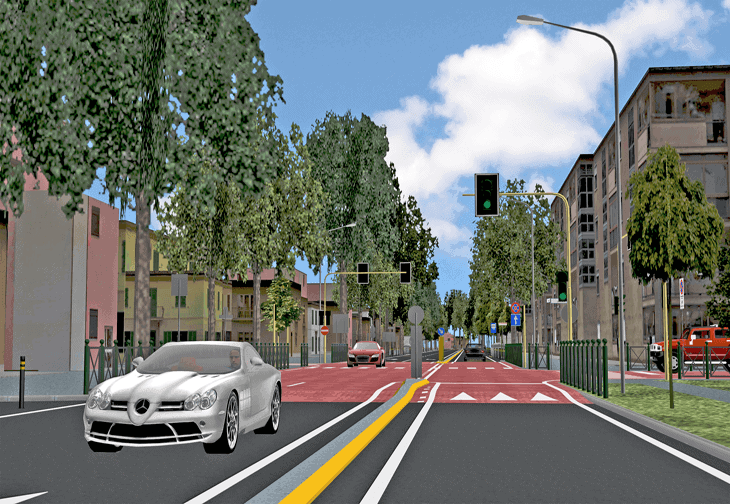
Gli scenari virtuali di analisi
La costruzione degli scenari di analisi è indubbiamente una delle attività più onerose nell’ambito di una sperimentazione condotta mediante l’utilizzo di un simulatore di guida. È, pertanto, opportuno verificare preventivamente la significatività dei dettagli da riprodurre nella generazione degli scenari virtuali. Questa fase dell’indagine ha posto in evidenza, trattandosi di un tracciato stradale che si sviluppa in un ambiente urbano-residenziale, la necessità di rappresentare con il maggior dettaglio possibile oltre le caratteristiche proprie dell’infrastrutture stradale anche il paesaggio esterno all’infrastruttura stradale (edifici, vegetazione, ecc.) rispettando i principali caratteri morfologici dell’area attraversata, che indubbiamente possono influenzare lo stile di guida adottato dagli utenti della strada. Per la presente attività sperimentale sono stati costruiti quattro tracciati sperimentali di analisi che rappresentano rispettivamente la configurazione dello stato di fatto, la configurazione di progetto (corrispondente al progetto di adeguamento di Via Pistoiese descritto nella prima parte dell’articolo) e due ulteriori configurazioni caratterizzate da soluzioni progettuali alternative a quest’ultima. I tracciati virtuali di tutte le configurazioni di analisi hanno uno sviluppo di circa 8 km e sono composti da una strada extraurbana secondaria (C1) di circa 5 km di sviluppo e dal tracciato di Via Pistoiese fino all’intersezione di quest’ultima con Via del Pesciolino. Il passaggio dall’ambito extraurbano a quello di carattere urbano-residenziale che caratterizza Via Pistoiese avviene mediante l’interposizione di una rotatoria posta in corrispondenza del sottopasso dell’Autostrada A1, come nella situazione reale.
Il tracciato extraurbano costruito a monte di Via Pistoiese non corrisponde a nessuna delle strade che nella realtà confluiscono nella rotatoria di cui sopra ed è stato inserito al fine di far giungere l’utente nel tratto in esame dopo aver percorso un tratto di strada extraurbana come avviene nella realtà. Con lo scopo di impedire al conducente di adottare comportamenti di guida non idonei, quali usufruire di tutta la sede stradale per le manovre più difficoltose (per esempio, la percorrenza di curve), piuttosto che invadere, in caso di cattiva percezione del tracciato, l’altra corsia di marcia, ecc., si è scelto di simulare la presenza di un certo flusso di traffico. Nello specifico, è stato previsto l’inserimento di dieci veicoli autonomi organizzati come “swarm” intorno al veicolo interattivo. Nel tratto stradale extraurbano a monte di Via Pistoiese, il traffico autonomo è stato programmato in modo che viaggiasse in entrambe le direzioni di marcia, mentre nel tratto stradale in esame (a partire dalla rotatoria posta in corrispondenza del sovrappasso dell’A1), al fine di evitare di influenzare la velocità dei guidatori, è stato previsto che i veicoli autonomi percorressero solamente la direzione opposta alla direzione di marcia del veicolo interattivo.